Entrepreneurship in the territories: is it the right time?


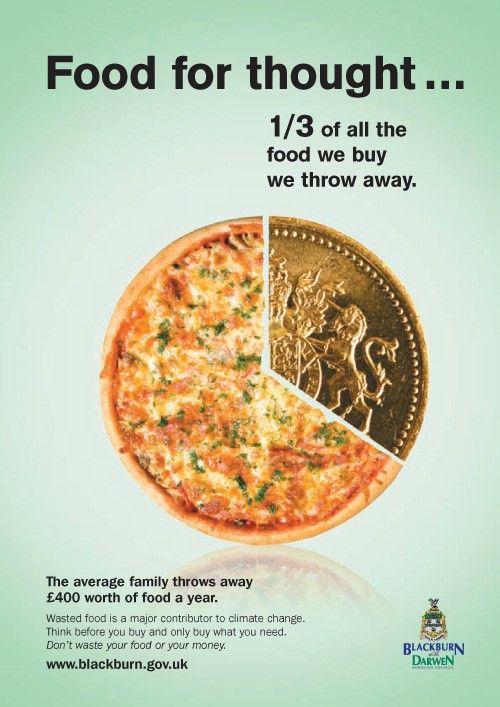
Reducing Food wastage in Restaurants. As we know restaurants make a lot of food in wasting and we have the campaign to give that food the needy people.
Responsible products or services
The company's mission is to design eco-responsible products and services aligned with the needs of the ecological transformation.
Virtual and augmented reality applications need quick generation and access to massive amounts of 3D models. Editing or deforming existing 3D models based on a reference, such as a simple 2D photograph, is an efficient technique to meet this requirement. We describe 3DN, an end-to-end network that deforms the source model to resemble the target, given a source 3D model and a target that may be a 2D picture, 3D model, or a point cloud obtained as a depth scan. While maintaining the mesh connectivity of the source model intact, our technique infers per-vertex offset displacements. We provide a training technique that generalises our method across source and target models with varied mesh densities by using an unique differentiable operation, the mesh sampling operator. To handle meshes with various topologies, a mesh sampling operator may be effortlessly incorporated into the network. In comparison to state-of-the-art learning-based approaches for 3D shape creation, qualitative and quantitative data reveal that our method produces superior quality outcomes. Virtual and augmented reality applications, as well as robotics, need the quick generation and access to a huge number of 3D models. Even while big 3D model databases are becoming more widely available [1,] their size and expansion pale in comparison to the immense scale of 2D picture databases. As a consequence, the research community is pursuing the possibility of altering or deforming existing 3D Modeling Services based on a reference picture or another source of input such as an RGBD scan. Traditional methods for altering 3D models to fit a reference target depend on optimization-based processes that either involve human participation [32] or rely on a database of segmented 3D model components [9]. 3DN is a 3D deformation network that deforms a source 3D mesh based on a target 2D image, 3D mesh, or 3D point cloud (e.g., obtained using a depth sensor) described in this article. Unlike earlier work, we use the mesh structure of the source model instead of assuming a fixed topology mesh for all samples. This implies we can create new models from any current high-quality mesh model. Our network predicts vertex displacement vectors (3D offsets) to modify the source model while retaining mesh connectedness, given any source mesh and a target. Furthermore, to improve the believability of the output model, the global geometric limitations shown by many man-made objects are explicitly kept during deformation. The global characteristics of both the source and target inputs are extracted initially by our network. To estimate per-vertex offsets, they are sent through an offset decoder. Because obtaining ground truth correspondences between the source and target is difficult, we calculate the similarity of the deformed source model and the target using unsupervised loss functions (e.g., Chamfer and Earth Mover's distances). We test our method on a variety of targets, including 3D shape datasets, genuine photos, and partial point scans. In contrast to earlier learning-based approaches, qualitative and quantitative evaluations show that our network learns to execute superior quality mesh deformation. We also demonstrate a number of applications, including shape interpolation. Finally, here is a list of our contributions: To forecast 3D deformation, we propose an end-to-end network. We can produce convincing distorted meshes by keeping the original mesh topology unchanged and retaining characteristics like symmetry. To make our network design adaptable to variable mesh densities in the source and target models, we suggest a differentiable mesh sampling operator. provide a method for computing correspondences between deformable models like people. They do, however, employ an intermediate common template representation for man-made things, which is difficult to get. Methods to learn FFD are introduced by Pontes et al. [16] and Jack et al. [11]. Foldingnet [35] is a method proposed by Yang et al. for deforming a 2D grid into a 3D point cloud while keeping locality information. By managing source meshes with diverse topologies and maintaining information in the original mesh, our methodology is able to create better quality deformed meshes than current existing approaches. The final objective is to construct a loss function that assesses the similarity between S and T, given a deformed mesh S generated by 3DN and the 3D mesh corresponding to the target model T = (VT, ET). Because establishing ground truth correspondences between S and T is difficult, we rely on the Chamfer and Earth Mover's losses proposed by Fan et al. [3]. We work on a collection of points uniformly sampled on S and T by adding the differentiable mesh sampling operator to make these losses resistant to different meshing densities across source and target models (DMSO). DMSO is smoothly incorporated into 3DN, bridging the gap between mesh management and point set loss calculation.
Our research also relates to single-view 3D reconstruction approaches, which have lately attracted a lot of interest from the deep learning community. These methods made use of voxels, point clouds, octrees, and primitives, among other 3D representations. Sun et al. provide a dataset for single-image 3D modelling. In this collection, however, pose ambiguity and artefacts are common. Sinha et al. [19] recently proposed a technique for generating an object's surface using a representation based on geometry pictures. Groueix et al. [7] take a similar approach, presenting a technique for generating 3D form surfaces using a collection of parametric surface components. To build models from picture sets, Hiroharo et al. [13] and Kanazawa et al. [12] employ a differentiable renderer and per-vertex displacements as a deformation approach. Wang et al. [25] provide a graph-based network for reassembling 3D manifold structures from input photos. These new approaches, on the other hand, are confined to producing manifolds and need topology invariant 3D output for all cases.


Discover all the resources to inspire and guide you in the world of positive impact. Testimonials, analyses, job descriptions and skills of tomorrow, everything you always wanted to know without daring to ask.




You no longer thrive in your work, and you plan to change profession to find more meaning in your professional life? Discover the resources to help you think about a retraining project and find your way.





